czytano: 3911 razy
Genialne ujęcia z lotu ptaka. Czym jest multikopter?

W najprostszych słowach można powiedzieć, że multikopter w celu uzyskania siły nośnej korzysta z wielu śmigieł (zamiast z pojedynczego wirnika, jak to jest w tradycyjnym śmigłowcu). Nie ma też śmigła ogonowego (używanego do kontrolowania odchylenia i przeciwdziałania momentowi reakcyjnemu, który jest wytwarzany przez pracujący wirnik główny helikoptera). Multikoptery występują w wielu konfiguracjach. Istnieją bikoptery (z dwoma wirnikami na wzór helikoptera CH-46), trikoptery, kwadrokoptery itd. Na przedstawionych zdjęciach możesz zobaczyć przykładowy kwadrokopter oraz dwie konfiguracje heksakopterów (z sześcioma wirnikami).
Zastanówmy się także nad tym, czym nie jest multikopter. Wszyscy słyszeliśmy to budzące grozę określenie… dron. Multikopter tak naprawdę nie jest dronem w pełnym tego słowa znaczeniu. Amerykańska Federalna Administracja Lotnictwa (ang. Federal Aviation Administration — FAA) definiuje multikopter jako bezzałogowy system latający (ang. Unmanned Aerial System — UAS). Termin UAS obejmuje szeroką gamę statków powietrznych, od dronów do sterowanych radiem modeli samolotów używanych przez hobbystów. Większość multikopterów jest pilotowana w zasięgu wzroku, tak samo jak to jest w przypadku kontrolowanych radiowo modeli. Tego rodzaju urządzenia nie są uważane za drony. Technicznie rzecz ujmując, drony wylatują poza zasięg wzroku i mają możliwość działania autonomicznego (autopilot).
[kn_free]
Za pomocą wyspecjalizowanego wyposażenia możesz pilotować multikopter, mając do dyspozycji telemetrię, kamerę przekazującą obraz z perspektywy pierwszej osoby itd., a także przekształcić swój multikopter w pełni autonomicznego drona. Niektóre drony są zatem multikopterami, ale nie każdy multikopter jest dronem.
[kn_advert]
Większość pilotów multikopterów unika jednak określenia "dron". Jest tak, ponieważ słowo to przywodzi na myśl obrazy ataków powietrznych przeprowadzanych za pomocą rakiet i działek umieszczanych na dronach. Na przykład w jednym z artykułów o multikopterach, opublikowanym w 2013 roku w wydawanej w Santa Rosa gazecie The Press Democrat, zacytowano oficera policji z Santa Rosa, który mówił o "powietrznych strzelaninach między gangami", jakby to były przestępstwa dokonywane tuż za rogiem. Gdy już będziesz wiedzieć, jak lata multikopter, pomysł zamontowania na nim uzbrojenia wyda Ci się śmiechu warty i niedorzeczny. Wystrzał z broni zamontowanej na dronie powoduje taki odrzut (daje kopa), że możemy wręcz wyobrazić sobie Wilusia E. Kojota goniącego Strusia Pędziwiatra. Multikopter zostaje wystrzelony do tyłu, a pocisk pozostaje w miejscu. Po prostu śmieszne!

Do głównych zadań multikopterów należy filmowanie oraz fotografowanie. Jaka jest wobec tego różnica między multikopterem a dronem? Odpowiedź leży w systemach sterujących oraz sposobach użycia tych statków powietrznych.
Nadal jesteś zdezorientowany? Bez obaw, ta książka rozwieje Twoje wątpliwości. Zabierzmy się za zgłębianie tematu…
Jak latają multikoptery?
Multikoptery latają dzięki wykorzystaniu dwóch podstawowych zasad: siły nośnej i momentu reakcyjnego. Stanowią one doskonałe ćwiczenie praktyczne z fizyki newtonowskiej (każdemu działaniu towarzyszy równe co do wartości i przeciwnie zwrócone przeciwdziałanie). W tradycyjnym helikopterze wirnik główny obraca się w jednym kierunku. Aby kadłub helikoptera nie obracał się w drugą stronę (pamiętaj, że każdemu działaniu towarzyszy równe co do wartości i przeciwnie zwrócone przeciwdziałanie), stosowane jest śmigło ogonowe, które wywiera stałą siłę na belkę ogonową, dzięki czemu kadłub śmigłowca pozostaje stabilny. W multikopterze stosowane są przeciwbieżne śmigła, które stabilizują jego kadłub podczas ich wirowania.
Obroty samolotu wzdłuż jego osi nazywane są pochyleniem, odchyleniem oraz przechyleniem. Pochylenie to skierowanie dziobu samolotu w górę albo w dół. Odchylenie to skierowanie samolotu w lewo lub w prawo. Przechylenie to takie ustawienie statku powietrznego, że jedna z jego stron znajdzie się niżej niż druga (przechylenie w lewo spowoduje, że lewe skrzydło samolotu opadnie w dół).
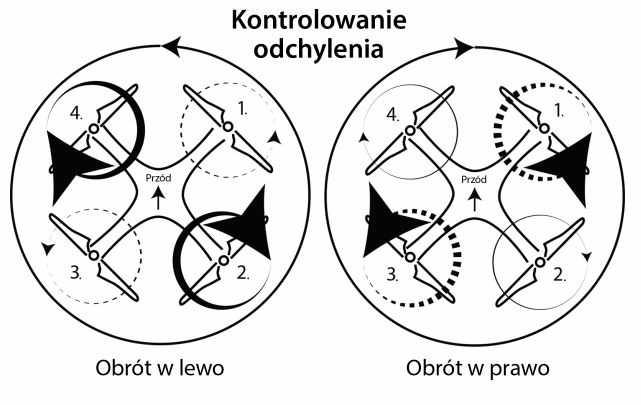
Kontrolowanie odchylenia multikoptera
Multikopter korzysta z poniżej opisanych zasad dotyczących pochylenia, odchylenia oraz przechylenia. Na rysunku na następnej stronie możesz zobaczyć, że śmigła 1. i 3. obracają się w jednym kierunku, podczas gdy 2. i 4. w drugim. Spowalniając śmigła 2. i 3. oraz przyspieszając 2. i 4., można sprawić, że multikopter odchyli się w lewo. Moment obrotowy wirujących w prawo śmigieł 2. i 4. powoduje obrót kadłuba w lewo i odwrotnie — po spowolnieniu obrotów śmigieł 2. i 4. oraz przyspieszeniu 1. i 3. multikopter odchyli się w prawo.
Siła nośna multikoptera
Omówiliśmy więc kwestię kontrolowania kierunku. A w jaki sposób multikopter porusza się w górę i w dół? Manewry te odbywają się podobnie jak w przypadku tradycyjnego śmigłowca. Zwiększenie obrotów wszystkich silników powoduje większy przepływ powietrza w dół. Wypychając większą ilość powietrza w dół, multikopter wznosi się, ponieważ objętość powietrza wypływającego spod śmigieł daje ciąg przekraczający wagę multikoptera. Jeśli prędkość obrotowa śmigieł zostanie zmniejszona, ciąg może zrównać się z ciężarem multikoptera (powodując jego zawis) lub spaść poniżej tego ciężaru, co doprowadzi do opadania multikoptera. Na drugim rysunku na następnej stronie pokazano dobry przykład multikoptera utrzymującego się w zawisie.

Jak porusza się multikopter?
To właśnie w ruchu multikopter może naprawdę zabłysnąć. Tradycyjny śmigłowiec nie jest pod każdym kątem symetryczny. Gdy zatem helikopter leci w bok, jego ogon chce obrócić się do tyłu, a dziób ustawić się w kierunku lotu. Ogon śmigłowca jest popychany przez wiatr niczym wiatrowskaz. Pilot musi temu zjawisku przeciwdziałać, utrzymując stały kierunek lotu, inaczej problemem może stać się stabilność. Multikoptery są symetryczne z każdej strony, w związku z czym z punku widzenia pilota ruch w bok jest tym samym co lot do przodu.
Tak samo jak to jest w przypadku tradycyjnego helikoptera, multikopter porusza się do przodu, do tyłu oraz na boki dzięki pochylaniu kadłuba. Pochylanie multikoptera zmienia kierunek ciągu generowanego przez wirniki. Na przykład opuszczenie dzioba i podniesienie ogona sprawia, że powietrze jest tłoczone nie tylko w dół, ale także do tyłu multikoptera. Jeśli każdemu działaniu towarzyszy równe, lecz przeciwnie zwrócone przeciwdziałanie, to ruch powietrza w kierunku tyłu multikoptera spowoduje ruch multikoptera do przodu. Aby obniżyć jedną stronę, należy zmniejszyć prędkość wirowania śmigieł, a w celu uniesienia drugiej strony obroty silników po tej stronie należy zwiększyć. Na poniższym rysunku pokazano, jak realizowany jest ruch postępowy multikoptera:

Wszystko to wydaje się dość proste, prawda? Zwiększanie i zmniejszanie prędkości każdego z silników powoduje ruch multikoptera w różnych kierunkach. Kierunek ten zależy tylko od kombinacji silników, których prędkość jest zmieniana. W multikopterze znajduje się mniej ruchomych części niż w tradycyjnym śmigłowcu. Ruch w jednym kierunku odbywa się tak samo jak ruch w każdym innym kierunku, ponieważ aerodynamika multikoptera jest symetryczna.
Dlaczego więc nadal istnieją tradycyjne helikoptery? Powód jest taki, że dopiero niedawno (po roku 2000) elektronika i pozostałe elementy multikopterów stały się na tyle praktyczne i małe, że mogły znaleźć zastosowanie. Wyobraź sobie niezależne kontrolowanie prędkości każdego z silników w celu sterowania multikopterem na podstawie obserwacji jego lotu; nie będzie to możliwe bez pomocy zaawansowanej elektroniki, co prowadzi nas do następnego podrozdziału.
Z czego składa się multikopter?
Bardziej szczegółowo zajmiemy się poszczególnymi częściami w rozdziale 3., "Wybór podzespołów". Teraz dowiemy się tylko, z czego jest zbudowany multikopter.
Płatowiec
Płatowce multikopterów mają rozmaite kształty i rozmiary, od podstawowych kwadrokopterów, aż po ogromne ośmiowirnikowe oktokoptery. Są one także dostępne w szerokim zakresie cenowym. Czasami większe i droższe płatowce rzeczywiście są lepsze, chociaż w istocie rzadko tak bywa. Więcej szczegółów przedstawimy w dalszej części książki, ale pamiętaj, że zanim wybierzesz jakiekolwiek elementy, powinieneś mieć na uwadze swój cel. Większy nie zawsze oznacza lepszy, a z kolei mniejszy nie uniesie dużego ciężaru. Na zdjęciu na następnej stronie widać płatowiec heksakoptera, który kosztuje mniej niż 100 dolarów, ale potrafi całkiem sporo udźwignąć. Oczywiście podzespoły potrzebne do pilotowania takiej bestii mogą kosztować Cię grubo ponad 3000 dolarów (nie wliczając w to akumulatorów).
Silniki i śmigła
Silniki i śmigła są głównymi systemami napędowymi multikoptera. Tak naprawdę to właśnie one odgrywają decydującą rolę. Elementy te poddawane są największym obciążeniom spośród wszystkich komponentów multikoptera. Każdy gram, który dźwiga Twój multikopter, spoczywa na łopatach śmigieł. Można więc stwierdzić, że ich wytrzymałość jest nieodzowna.
Im większe są łopaty, tym większą siłę nośną generują. Wraz ze wzrostem wielkości łopat rośnie jednak też nacisk wywierany na piastę śmigła, a siły je odkształcające stają się coraz większe. Łopaty, na których przyoszczędzisz, odłamią się, a cała Twoja inwestycja runie i rozbije się o ziemię.
Poza tym im większe są łopaty, tym mocniejszy musi być silnik, aby sprostać momentowi obrotowemu, który jest wymagany do wprawienia śmigła w ruch. Może się wydawać, że silnik tak naprawdę nie napotyka na większy opór, ale w rzeczywistości jest inaczej. Jeśli śmigło porusza wystarczającą ilość powietrza, aby unieść w górę kilkanaście kilogramów ładunku, powstaje przy tym całkiem spory opór aerodynamiczny, z którym silnik musi sobie dać radę. Szybsze silniki są słabsze. Ogromnym zadaniem jest takie dobranie właściwych śmigieł, silników itd., aby przez jak najdłuższy czas unosić zadany ładunek.

Na poniższym rysunku pokazano śmigło z włókna węglowego przymocowane do silnika obracającego się z prędkością 480 RPM (obrotów na minutę) na wolt (KV):

Elektroniczna kontrola prędkości
Elektroniczna kontrola prędkości (ang. electronic speed control — ESC) to wspaniały wynalazek. Dzięki niej loty multikopterów są w ogóle możliwe. Silniki elektryczne wymagają większego napięcia podczas rozruchu niż do utrzymywania obrotów przy niskiej prędkości. Poza tym wraz ze wzrostem napięcia ich obroty niekoniecznie rosną proporcjonalnie. ESC maksymalizuje napięcie w celu uruchomienia silnika, po czym zmniejsza je, aby utrzymać obroty na niskim poziomie. Kiedy mocniej wychylisz dźwignię przepustnicy, ESC stopniowo przyspieszy obroty silnika. Ponadto większość układów ESC można zaprogramować do pracy zgodnej z wybranym profilem. Prawdziwy komputerowiec może mieć świetną zabawę już podczas samego tylko konfigurowania tych urządzeń. Nie pozwól jednak, aby to wszystko Cię zniechęciło. Większość systemów ESC ma wstępnie zaprogramowaną konfigurację, dzięki czemu możesz przystąpić do działania bez konieczności zagłębiania się w temat.
Urządzenia ESC pośredniczą między akumulatorem a silnikiem. Powinny być starannie zgrane z silnikiem, aby przekazać mu wystarczająco dużo mocy i go nie spalić. Zamontowanie w multikopterze zbyt słabego ESC może prowadzić do wypadków albo nawet pożarów. Każdy silnik powinien mieć własny układ ESC. Na poniższym zdjęciu pokazano sześć urządzeń ESC przymocowanych do ramy multikoptera.

System sterowania (mózg)
To właśnie tutaj dzieje się cała magia. Aby multikopter mógł latać, muszą być przeprowadzane dosłownie dziesiątki tysięcy obliczeń na sekundę w celu ustalenia, czy Twój pojazd leci w górę, czy w dół; czy się przemieszcza, pochyla, czy obraca; a wszystko to podczas sterowania silnikami, aby reagować na pojawiające się siły i zagwarantować stabilność multikoptera. Istnieje kilka aspektów systemów sterowania, które warto omówić.
Obecnie większość systemów sterowania jest wyposażona w taki sam zestaw czujników. Główna różnica między poszczególnymi systemami polega na prędkości wykonywania obliczeń oraz algorytmach użytych w firmware. Właśnie tak… firmware. Multikoptery to dosłownie latające komputery.
Na poniższym zdjęciu możesz zobaczyć trzy główne elementy systemu sterowania DJI WooKong-M (system ten jest od kilku lat standardowym urządzeniem stosowanym w multikopterach, posłuży on więc jako nasz przykład):
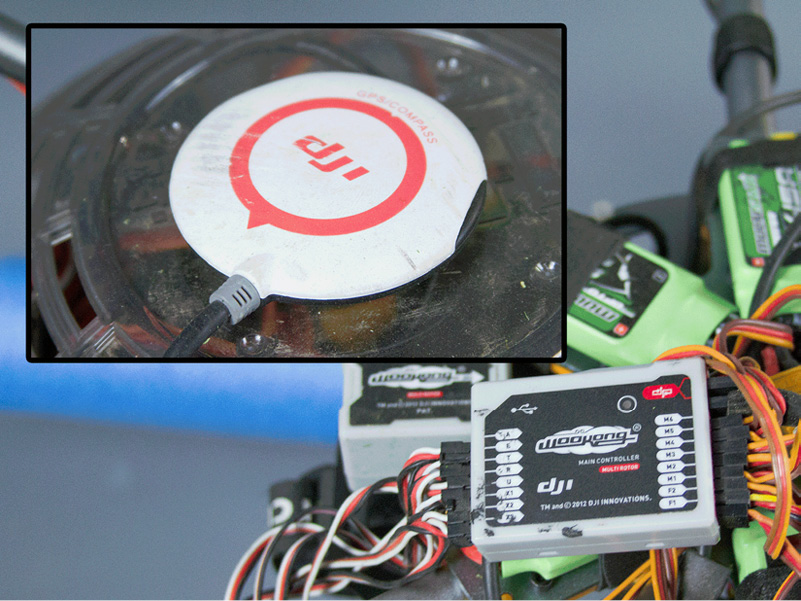
Widoczny na zdjęciu okrągły moduł jest anteną spełniającą dwa zadania. Ustala on zarówno kierunek (za pomocą kompasu), jak i lokalizację GPS (namierzając od 6 do 12 satelitów). Dzięki temu może on przesyłać bardzo dokładne dane do mózgu, który na ich podstawie wykonuje swoją pracę.
W innej części fotografii widoczne są dwa szare pudełka. To na dalszym planie jest modułem czujników. Zawiera ono trzyosiowy akcelerometr oraz żyrokompasy używane w celu określania tysiące razy na sekundę pochylenia, przechylenia i odchylenia multikoptera. Ponadto znajduje się w nim barometr stosowany do ustalania wysokości. Pudełko na dalszym planie to mózg odczytujący wszystkie informacje oraz polecenia sterujące (pochodzące z odbiornika radiowego po lewej stronie), porównujący je z danymi pochodzącymi z GPS i kompasu w celu utworzenia obrazu sytuacji, w jakiej znajduje się dron (a także tego, co chcesz z nim zrobić), oraz wysyłający polecenia dotyczące prędkości do modułów ESC (z prawej strony), a w rezultacie do silników, które mogą poprawnie i stabilnie napędzać Twój multikopter. Jak już mówiłem, to właśnie tu dzieje się magia.
Istnieją ponadto dodatkowe urządzenia, które mogą współpracować z systemem sterowania. Gimbale do kamer można podczepić do WooKong-M (i większości innych systemów), dzięki czemu gdy multikopter pochyli się w czasie lotu, kamera zachowa swoje położenie. Ponadto do nadajnika kamery można podłączyć moduł OSD umożliwiający podgląd na przekazywanym z kamery obrazie danych telemetrycznych, w tym poziomu naładowania baterii, położenia, wysokości itd. Na poniższym zdjęciu pokazano moduł lotu autonomicznego. Komunikuje się on z lecącym multikopterem za pomocą iPada. Możesz kliknąć miejsce na mapie w Google Earth… a multikopter tam poleci. Możesz nawet wykreślać wstępnie zaprogramowane ścieżki lotów. Tego rodzaju dodatkowe urządzenia mogą przeistoczyć Twój multikopter w prawdziwego drona.

Gimbal do kamery i nadajniki
Określenie gimbal do kamery to szybki sposób na powiedzenie "sprytne urządzenie, które utrzymuje kamerę w stałym położeniu i zmniejsza jej wibracje bez względu na to co, w granicach rozsądku, robi multikopter". No tak… "gimbal do kamery" jest zdecydowanie krótszy. Ogólnie rzecz ujmując, urządzenia te są podłączane do systemów sterowania i konfigurowane przez pilota (czyli Ciebie) w taki sposób, aby działały prawidłowo. Gimbale (w każdym razie te dobre) nie są tanie. Wraz z ciężarem, jaki są w stanie udźwignąć, oraz zakresem ruchów, które mogą wykonać, ich cena rośnie wykładniczo. Gimbal pokazany na poniższym zdjęciu może unieść cyfrową lustrzankę jednoobiektywową. Jest produkowany przez Photoship One, a nowy kosztuje około 800 dolarów.

Ważne jest jeszcze, aby mieć dobry nadajnik. Nie słyszałem o żadnym kamerzyście, który kierował kamerę drona w jakimś ogólnym kierunku i miał nadzieję na zrobienie wspaniałych ujęć tego, co chciał sfilmować. Nie słyszałem, bo to niedorzeczne, a także pierwszy sygnał tego, że wynająłeś niewłaściwego pilota. Systemy nadawczo-odbiorcze z reguły nie są drogie i możesz oczekiwać, że będzie to jedna z najtańszych inwestycji, jakie poczynisz. Mimo wszystko powinieneś zachować czujność. Jeśli wybierzesz zły system, może on bardzo szybko wysysać energię z akumulatorów.
Systemy radiowe
System radiowy stanowi najważniejszy interfejs między człowiekiem a maszyną. Ważny jest wybór systemu dobrego i właściwego dla Ciebie. Przyciski powinny być łatwe do odszukania, a sam system ma być przede wszystkim niezawodny. Nadajniki UKF należą już do przeszłości. Futaba i jej FASST oraz Spektrum/JR (razem z DSMx) wyznaczają trendy obowiązujące obecnie i w przyszłości. Nie musisz się już przejmować nakładającymi się nadajnikami, wywoływaniem kanałów i zanikami sygnału. Nadajniki i odbiorniki nowej generacji są parowane cyfrowo, a ich zasięg propagacji można mierzyć w kilometrach. Na poniższym rysunku pokazano nadajnik Spektrum DX7s oraz odbiornik AR-8000 z satelitą.

To tylko niewielki fragment książki wydawnictwa Helion "Drony. Wprowadzenie" autorstwa Ty Audronis
www.swiatobrazu.pl